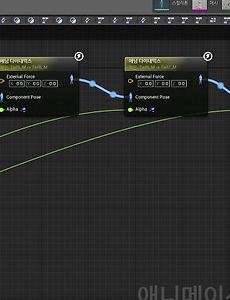
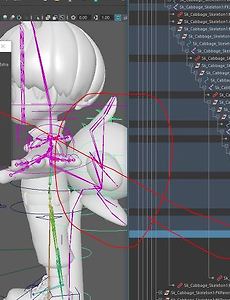
2019/023 자연스러운 Dynamic 설정 기억용 꼬리 다이내믹을 열심히 연구중입니다.자연스러운 다이내믹을 찾기 위해 여러가지 연구 끝에 가장 자연스러운 설정이 나름 발견되어 기억하고자 정리합니다.Tail 조인트는 7개로 설정되었으며 RootM과 Tail0_M의 설정값.Simulation Space를 World로 설정하고 Bound Bone을 Root본으로 설정합니다. 2~4번째 조인트 설정값Box Extend는 3가지 모두 15로 설정하고, Simulation Space는 Actor로 5~7 번째 조인트 설정값2~4랑 다 똑같고, Planar Limit값을 설정하여 바닥 충돌을 처리한다.위치 : y가 바닥 충돌면 위치 설정, 5번째 20, 6번째 40, 7번째 50으로 설정. 나머지는 모두 0. 아래 Z는 무시회전 : x:120, 나머지는 무시 바디 .. 2019. 2. 13. AdvancedSkeleton - 두 스켈레톤을 한스켈레톤으로 만들기 프로젝트를 진행하다 보니 각각의 페이셜을 가진 두개의 스켈레톤을 하나로 만들어야 하는 일이 발생했습니다. 의외로 간단하게 해결됩습니다.먼저 두 오브젝트를 머지그룹으로 불러옵니다.그리고 하위 오브젝트 전체 그룹을 상위 오브젝트에서 자식으로 지정할 FK Joint 의 자식으로 연결해 줍니다.부모 그룹의 FKChest_M의 자식으로 자식 그룹의 Motion System 그룹을 넣어줍니다. 한마디로 요약해서 컨트롤러 그룹끼리, 부모 자식 관계를 만들어주고 작업하면 되고, Export할때는 두 그룹 메시와 Deformation 그룹을 각각 선택하여 Export하면 정상적으로 데이터가 뽑히게 됩니다. 2019. 2. 11. Advanced Skeleton - 페이셜 하이 셋업 언리얼로 익스포트 하기. 보호되어 있는 글 입니다. 2019. 2. 7. 이전 1 다음